Autonomous vehicles, once science fiction, are now taking us towards a new era in transportation. This groundbreaking technology is not just approaching reality; it is completely changing how we move. These vehicles are being engineered to function without human intervention, harnessing a network of sensors, cameras, radar, GPS, and LiDAR which grant them the ability to interpret their environment and determine the optimal course of action.


Prominent autonomous vehicles
The evolution of autonomous vehicle technology spans different levels of automation:
- Level 0: No automation; the driver controls all aspects.
- Levels 1 to 4: Gradual automation, with increasing driver assistance and shared control between humans and automated systems.
- Level 5: Full autonomy under all conditions, without any human input.
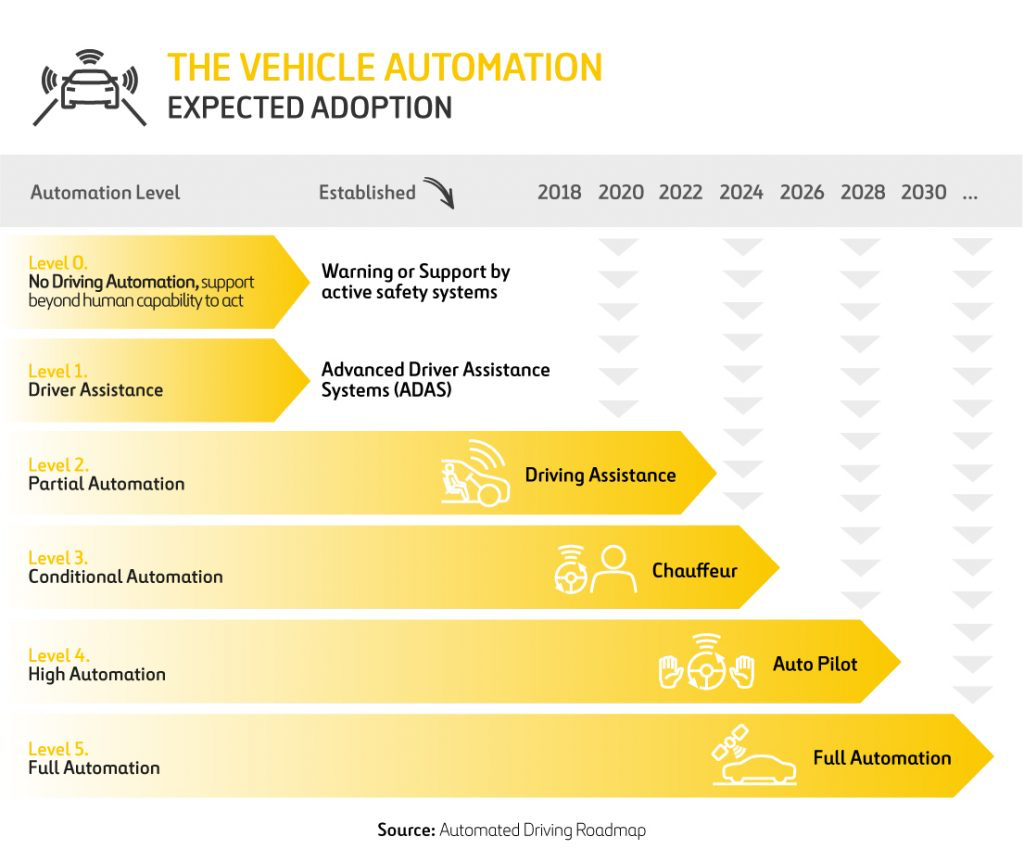
Different stages of vehicle automation
These vehicles promise numerous benefits, including improved safety, enhanced mobility, and better overall traffic flow. However, implementing them on a large scale within existing road traffic networks remains challenging due to safety risks, as well as ethical and legal concerns. However, these technologies have been gaining acceptance in numerous industrial applications wherein the environment and other external factors can be designed and controlled precisely.
Large cargo movers and logistics operators have been at the forefront in applying these technologies, in areas such as container ports, airports (specifically in cargo handling), and cross-docking facilities. In such settings, where the management of traffic and the optimisation of movement is very important, automation emerges as a powerful tool for companies to lower risks, improve performance. It also helps to further their sustainability objectives since automation can lead to a reduction in idle times and optimised route planning, which in-turn can decrease fuel consumption and lower carbon emissions.
A prime example of this is Tuas Port in Singapore, which, when fully completed in 2040, will be the world’s largest fully automated terminal. It features automated wharf and yard functions and full-electric automated guided vehicles, contributing to efficient container handling. With over 40 partly or fully automated ports operating worldwide and investments exceeding $10 billion, these ports leverage structured and predictable environments to generate cost savings and safety gains. This widespread adoption of automation in logistics hubs underscores the significant impact of autonomous technologies in enhancing efficiency and sustainability in the logistics industry.
Autonomous systems are also transforming warehousing operations, bringing significant efficiency gains. These systems are particularly beneficial in order-picking. For instance, Coca-Cola Singapore has recently adopted autonomous technologies in their warehouses to transport finished goods within the premises, illustrating the tangible benefits of automation in improving operational efficiency.
The logistics and trucking industry have embraced autonomous systems due to their potential benefits in safety, efficiency, and cost savings. For example, Volvo has made significant advancements in developing autonomous trucks, leveraging cutting-edge technologies to enhance transportation operations. With a growing demand for freight, a shortage of drivers, and increasing health and safety concerns, the long-haul transport industry is well-positioned to benefit from autonomy.



Applications of Autonomous Vehicles in Logistics and Warehousing
Most of the use cases of deployment of autonomous systems have been in closed-loop systems where there is the opportunity to control the deployment environment precisely with strict rules and algorithms for automated zones and appropriate training for the human operations. For example, in the Container Terminal Altenwerder, as shown in the image below, AGV and HV areas are segregated to minimize congestion and optimize movement. AGVs operate within dedicated lanes, efficiently shuttling containers without human intervention, while HVs navigate non-AGV areas following traditional traffic rules. The critical juncture is the interchange between AGV and HV zones, where merging traffic can create bottlenecks, posing safety and efficiency challenges. These systems are carefully designed to leverage the benefits of automation to improve efficiency at scale and rely on HVs where intuition and situational awareness are critical.
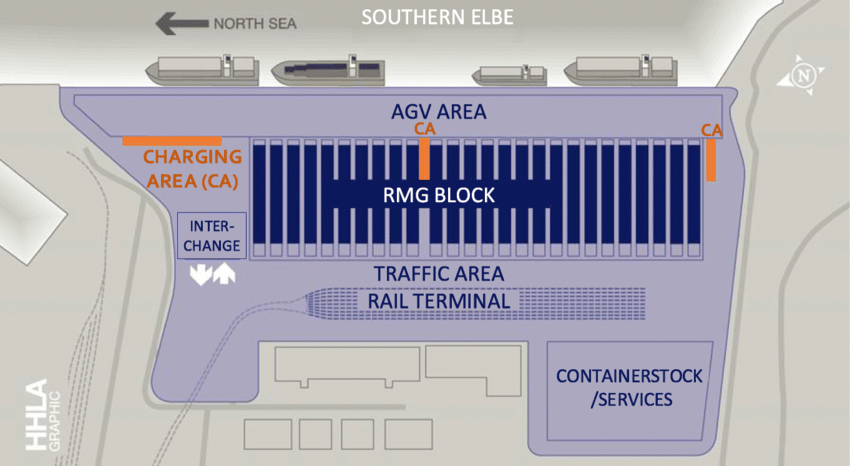
AGVs and HVs in the Altenwerder Container Terminal
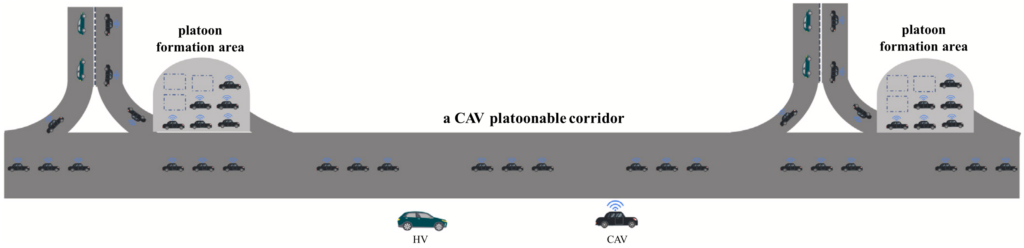
However, testing these technologies on public roads is an ongoing challenge. Since dedicated infrastructure for automated vehicles is expensive to build, in the early stages, these autonomous technologies will be sharing limited resources (roads) with Human vehicles (HVs), leading to poorer experiences for the normal road users. In the long-haul transport regime, one of the proposed technology is Connected Autonomous Vehicles (CAV). CAV’s leverage on numerous sensors and wireless technologies to sense the environment and coordinate with each other in real-time to ensure harmonious movement in platoons.
With the increased interest in autonomous vehicle technologies, several companies, including Embark, Daimler Benz, and Einride, are pushing the boundaries of innovation. When such platoons are deployed on regular highways, a proposal to reduce the complexity of coordination with other HV’s is to create Platoonable Corridors – i.e dedicated lanes for autonomous platoons. The flip side of this proposal is that the HV’s will experience reduced service quality as they will be limited to specific intersections to cross over these automated lanes or likely long diversions might be needed to get to their destinations. Evaluating the impact of introducing these technologies is crucial not only to assess the promised benefits but also to understand how they affect existing road infrastructure and users. Hence, thoughtful planning and policymaking are essential to ensure a balanced transition to an era of autonomous mobility.

In a recent paper, “Optimal Deployment of an Equitable CAV Platoonable Corridor on Road Networks with Mixed Traffic Flow.”, Researchers Zhu et al. employ a game-theoretic treatment to study these issues. The authors posit the interaction between the infrastructure designer and the HV driver as a Stackleberg game where the Transportation planner takes the role of the leader, proposing a specific infrastructure design and the HV acts as a follower by figuring out the optimal route choices thereby generating a signal on the impact to the traffic, congestion and the overall transportation costs.
The Stackelberg leadership model is a strategic game in economics in which the leader firm moves first and then the follower firms move sequentially (hence, it is sometimes described as the “leader-follower game”).
Wikipedia
By solving this bi-level problem the authors show that deployment of CAV has a positive social benefit to the system which is significant when the CAV’s market penetration ratios is high. Framing the problem as a strategic game allows the authors to derive key insights regarding the introduction of CAV’s. One insight is that the degree of the planner’s concern on inequity will influence the deployment of the CAV platoonable corridor, and it should be given significant consideration, particularly when the CAV market penetration ratio is low. However they also observe that the platoon size affects the generalised travel costs and there is much benefit to be harnessed by having larger platoons.
By framing the issue using game theory, the study showcases the ability to model a future transport network that includes CAVs and analyse the resulting dynamics under various scenarios. Modeling these systems within this framework can uncover valuable insights, making it a compelling approach as more technologies and transportation models emerge.